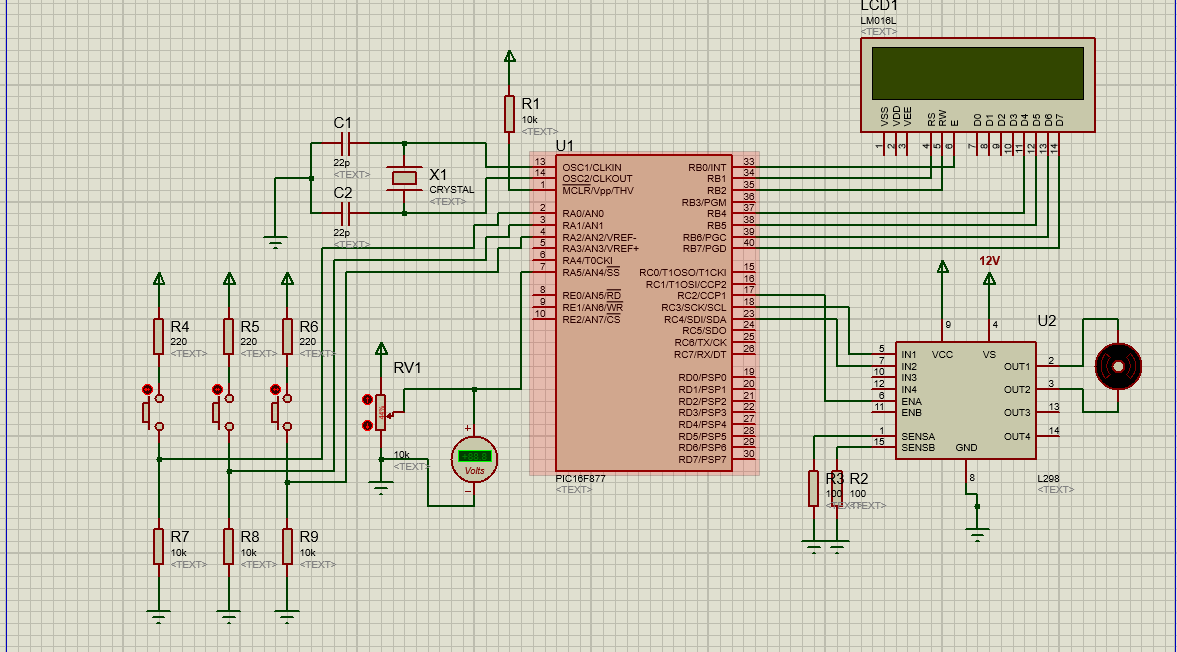
Bunu deneyin. Butonları simülasyonda A1, A2, A3 ve
pot girişini A0 olarak değiştirin.
Olmazsa, altta MPLABX için kodu da ekledim.
#include <16f877.h>
#device adc=8
#use delay(clock=4000000)
#fuses XT,NOWDT,NOPUT,NOLVP,NOCPD,NOPROTECT,NODEBUG,NOBROWNOUT,NOWRT
#use fast_io(a)
#use fast_io(b)
#use fast_io(c)
/*#define ileri pin_a0
#define geri pin_a1
#define dur pin_a2*/
#define ileri pin_a1
#define geri pin_a2
#define dur pin_a3
//#define input1 pin_b0
//#define input2 pin_b1
//#define enable_a pin_b2
//#define enable_b pin_b3
#define use_portb_lcd TRUE
#include <lcd.c>
unsigned int deger;
float voltaj;
void main()
{
setup_psp(PSP_DISABLED);
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DISABLED,0,1);
setup_adc_ports(NO_ANALOGS);
setup_adc(ADC_OFF);
setup_CCP1(CCP_OFF);
setup_CCP2(CCP_OFF);
setup_psp(PSP_DISABLED);
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DIV_BY_4,255,1);
setup_CCP1(CCP_PWM);
setup_CCP2(CCP_OFF);
setup_adc_ports(RA0_ANALOG);
setup_adc(adc_clock_div_32);
//setup_adc_ports(ALL_ANALOG);
set_tris_a(0x07); //0b 0000 0111
set_tris_b(0x00);
set_tris_a(0x20);
set_tris_b(0x00);
set_tris_c(0x20);
//output_high(enable_a);
//output_low(enable_b);
//set_adc_channel(4);
set_adc_channel(0);
delay_us(20);
output_c(0x00);
lcd_init();
printf(lcd_putc,"\fAhmet KULABAS\nB200101044");
delay_ms(1000);
set_pwm1_duty(0);
while(true)
{
if(input(ileri))
{
output_high(pin_c3);
output_low(pin_c4);
}
else if(input(geri))
{
output_low(pin_c3);
output_high(pin_c4);
}
else if(input(dur))
{
output_low(pin_c3);
output_low(pin_c4);
}
deger = read_adc();
delay_us(20);
voltaj = deger/51.0;
/*
output_high(pin_c3);
output_low(pin_c4);
*/
set_pwm1_duty(deger);
printf(lcd_putc,"\fVoltaj=%f V",voltaj);
lcd_gotoxy(1,2);
printf(lcd_putc,"Deger=%u",deger);
delay_ms(1000);
}
}
MPLABX için:
lcd.h
//LCD Functions Developed by electroSome
//------------------------------------------------------------------------------
//
void Lcd_Port(char a)
{
if (a & 1)
D4 = 1;
else
D4 = 0;
if (a & 2)
D5 = 1;
else
D5 = 0;
if (a & 4)
D6 = 1;
else
D6 = 0;
if (a & 8)
D7 = 1;
else
D7 = 0;
}
//------------------------------------------------------------------------------
//
void Lcd_Cmd(char a)
{
RS = 0; // => RS = 0
Lcd_Port(a);
EN = 1; // => E = 1
__delay_ms(4);
EN = 0; // => E = 0
}
//------------------------------------------------------------------------------
//
Lcd_Clear(void)
{
Lcd_Cmd(0);
Lcd_Cmd(1);
}
//------------------------------------------------------------------------------
//
void Lcd_Set_Cursor(char a, char b)
{
char temp, z, y;
if (a == 1)
{
temp = 0x80 + b - 1;
z = temp >> 4;
y = temp & 0x0F;
Lcd_Cmd(z);
Lcd_Cmd(y);
}
else if (a == 2)
{
temp = 0xC0 + b - 1;
z = temp >> 4;
y = temp & 0x0F;
Lcd_Cmd(z);
Lcd_Cmd(y);
}
}
//------------------------------------------------------------------------------
//
void Lcd_Init(void)
{
Lcd_Port(0x00);
__delay_ms(20);
Lcd_Cmd(0x03);
__delay_ms(5);
Lcd_Cmd(0x03);
__delay_ms(11);
Lcd_Cmd(0x03);
/////////////////////////////////////////////////////
Lcd_Cmd(0x02);
Lcd_Cmd(0x02);
Lcd_Cmd(0x08);
Lcd_Cmd(0x00);
Lcd_Cmd(0x0C);
Lcd_Cmd(0x00);
Lcd_Cmd(0x06);
}
//------------------------------------------------------------------------------
//
void Lcd_Write_Char(char a)
{
char temp, y;
temp = a & 0x0F;
y = a & 0xF0;
RS = 1; // => RS = 1
Lcd_Port(y >> 4); //Data transfer
EN = 1;
__delay_us(40);
EN = 0;
Lcd_Port(temp);
EN = 1;
__delay_us(40);
EN = 0;
}
//------------------------------------------------------------------------------
//
void Lcd_Write_String(const char *a)
{
int i;
for (i = 0; a[i] != '\0'; i++)
Lcd_Write_Char(a[i]);
}
//------------------------------------------------------------------------------
//
void Lcd_Shift_Right(void)
{
Lcd_Cmd(0x01);
Lcd_Cmd(0x0C);
}
//------------------------------------------------------------------------------
//
void Lcd_Shift_Left(void)
{
Lcd_Cmd(0x01);
Lcd_Cmd(0x08);
}
//******************************************************************************
main.c
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <string.h>
#include <xc.h>
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
// CONFIG
#pragma config FOSC = HS // Oscillator Selection bits (HS oscillator)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = ON // Power-up Timer Enable bit (PWRT enabled)
#pragma config BOREN = ON // Brown-out Reset Enable bit (BOR enabled)
#pragma config LVP = OFF // Low-Voltage (Single-Supply) In-Circuit Serial Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EEPROM Memory Code Protection bit (Data EEPROM code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off; all program memory may be written to by EECON control)
#pragma config CP = ON // Flash Program Memory Code Protection bit (All program memory code-protected)
#define _XTAL_FREQ 4000000
#define RS PORTBbits.RB0 //RD2
#define EN PORTBbits.RB1 //RD3
#define D4 PORTBbits.RB4 //RD4
#define D5 PORTBbits.RB5 //RD5
#define D6 PORTBbits.RB6 //RD6
#define D7 PORTBbits.RB7 //RD7
#include "lcd.h" // LCD kütüphanesi çağrılıyor
#define ileri PORTAbits.RA1
#define geri PORTAbits.RA2
#define dur PORTAbits.RA3
#define input1 PORTCbits.RC3
#define input2 PORTCbits.RC4
const char mb[] = " Mehmet Bilgi";
/*
* Project name:
* BJD_PWM_Functions
* Author:
* Barton J. Dring 08/2007
* Description:
* This code demonstrates some PWM functions
* Test configuration:
* MCU: PIC16F877A
* Dev.Board: EasyPIC4
* Oscillator: HS, 08.0000 MHz
* Ext. Modules: LCD
* SW: mikroC v6.0
* NOTES:
* None.
*/
/*
* ================ setPWMDuty ==================================================
*
* This sets the registers for the PWM duty. This is a maximum of a 10-bit value,
* but many PWM settings will limit this anount.
*
* Parameters:
* duty: The duty value to set in the register. This is the actual value,
* not a percent.
*
* Returns:
* none:
*
* =============================================================================
*/
void setPWMDuty(unsigned int duty)
{
CCPR1L = duty >> 2; // Set MSB values
CCP1CON = ((duty & 3) << 4) | 0x0C; // set initial duty and set PWM mode bits.
}
/*
* Pwim init
* http://eng-serve.com/pic/index.html
*/
void PWM_Init(void)
{
/*
* PWM Register Values
* Oscillator Frequency Fosc = 4000000
* Clock Frequency Fclk = 1000000
* PWM Freq = 3906 desired...actual: 3906
* Prescaler Value = 1
* PR2 = 255
* Maximum duty value = 1024
* Requested Duty Value = 512
*
* Code Provided AS IS....Use at your own risk!
*/
// be sure to set PWM port as output
T2CON = 0b00000100; // prescaler + turn on TMR2;
PR2 = 0b11111111;
CCPR1L = 0b10000000; // set duty MSB
CCP1CON = 0b00001100; // duty lowest bits + PWM mode
}
/*
* ADC init
*/
void adc_Init(void)
{
ADCON0bits.ADCS = 0b11; // Frc
ADCON1bits.ADFM = 0b1; // Right justified
ADCON1bits.ADCS2 = 0b1; // Frc
ADCON1bits.PCFG = 0b1110; // AN0 analog. Diğerleri dijital.
}
/*
* ADC Kanalı oku
*/
uint16_t adcOku(uint8_t kanal)
{
ADCON0bits.ADON = 0b1;
switch(kanal)
{
case 0:
ADCON0bits.CHS = 0b000;
break;
case 1:
ADCON0bits.CHS = 0b001;
break;
case 2:
ADCON0bits.CHS = 0b010;
break;
case 3:
ADCON0bits.CHS = 0b011;
break;
default:
break;
}
__delay_us(20); // Akustik zamanı 877A için 20us
ADCON0bits.nDONE = 0b1;
while(ADCON0bits.nDONE);
ADCON0bits.ADON = 0b0;
return(ADRESH << 8) | ADRESL;
}
/*
* MAIN
* PWM 10-bit ayarlandı, adc den okunan değer direkt PWM
* duty değeri olarak yazılabilir.
*/
void main(void)
{
unsigned int deger = 0;
float gerilim = 0.0;
int status = 0;
unsigned char yaz[10];
unsigned char yon[6];
PORTA = 0b00;
PORTB = 0b00;
PORTC = 0b00;
PORTD = 0b00;
PORTE = 0b00;
TRISA = 0xFF;
TRISB = 0x00;
TRISC = 0x00;
TRISD = 0x00;
TRISE = 0x00;
adc_Init();
Lcd_Init();
PWM_Init();
setPWMDuty(0);
Lcd_Clear();
PORTCbits.RC3 = 0b0;
PORTCbits.RC4 = 0b0;
strcpy(yon, "DUR ");
Lcd_Set_Cursor(1, 1);
Lcd_Write_String(mb);
__delay_ms(3000);
Lcd_Clear();
while(1)
{
if(ileri == 0b1)
{
__delay_ms(20);
if(ileri == 0b1)
{
PORTCbits.RC3 = 0b0;
PORTCbits.RC4 = 0b1;
strcpy(yon, "ILERI");
}
}
else if(geri == 0b1)
{
__delay_ms(20);
if(geri == 0b1)
{
PORTCbits.RC3 = 0b1;
PORTCbits.RC4 = 0b0;
strcpy(yon, "GERI ");
}
}
else if(dur == 0b1)
{
__delay_ms(20);
if(dur == 0b1)
{
PORTCbits.RC3 = 0b0;
PORTCbits.RC4 = 0b0;
strcpy(yon, "DUR ");
}
}
deger = adcOku(0);
//gerilim = deger / 51.0 / 4;
gerilim = deger * 0.004887585533;// ADC * 5 / 1023
setPWMDuty(deger);
Lcd_Set_Cursor(1, 1);
// 0123456789012345
Lcd_Write_String("Deger=");
itoa(yaz, deger, 10);
Lcd_Set_Cursor(1, 7);
Lcd_Write_String(" ");
Lcd_Set_Cursor(1, 7);
Lcd_Write_String(yaz);
Lcd_Set_Cursor(1, 12);
Lcd_Write_String(yon);
Lcd_Set_Cursor(2, 1);
// 0123456789012345
Lcd_Write_String("Gerilim=");
sprintf(yaz, "%4.2fV", gerilim);
//Lcd_Write_String(ftoa(gerilim, &status));
Lcd_Write_String(yaz);
__delay_ms(200);
}
}